Projects
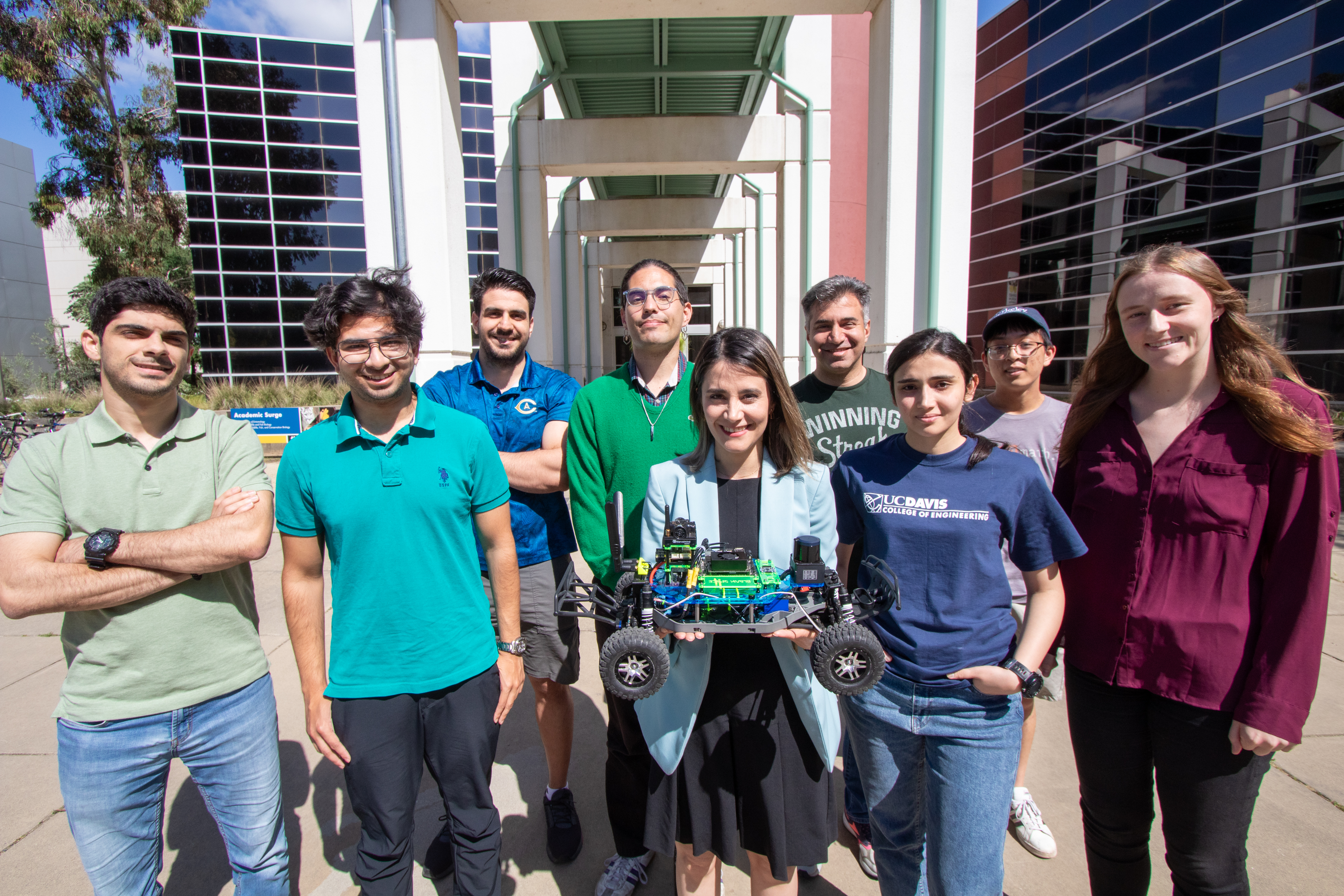
Autonomy & Robotics Research
Minimum Lap Time Autonomous Racing Stack in AutoDrive Simulator
Role: Researcher
Institution: CORE Lab, UC Davis
Year: Fall 2025
- Reactive control (LiDAR): Designed and implemented a LiDAR-based reactive controller for track following, achieving 100% collision-free operation over 10 consecutive laps on the Qualification Track.
- Path planning (prototype): Prototyped a Delaunay Triangulation–based (DTR) raceline generation approach and shared findings with the teammate owning the final planning module.
- Tracking control: Tuned the path-tracking PID controller to improve stability and lap consistency. This stage was validated using an idealized localization source (IPS) as a baseline.
- Localization transition: Worked on replacing IPS with onboard state estimation to enable fully autonomous operation.
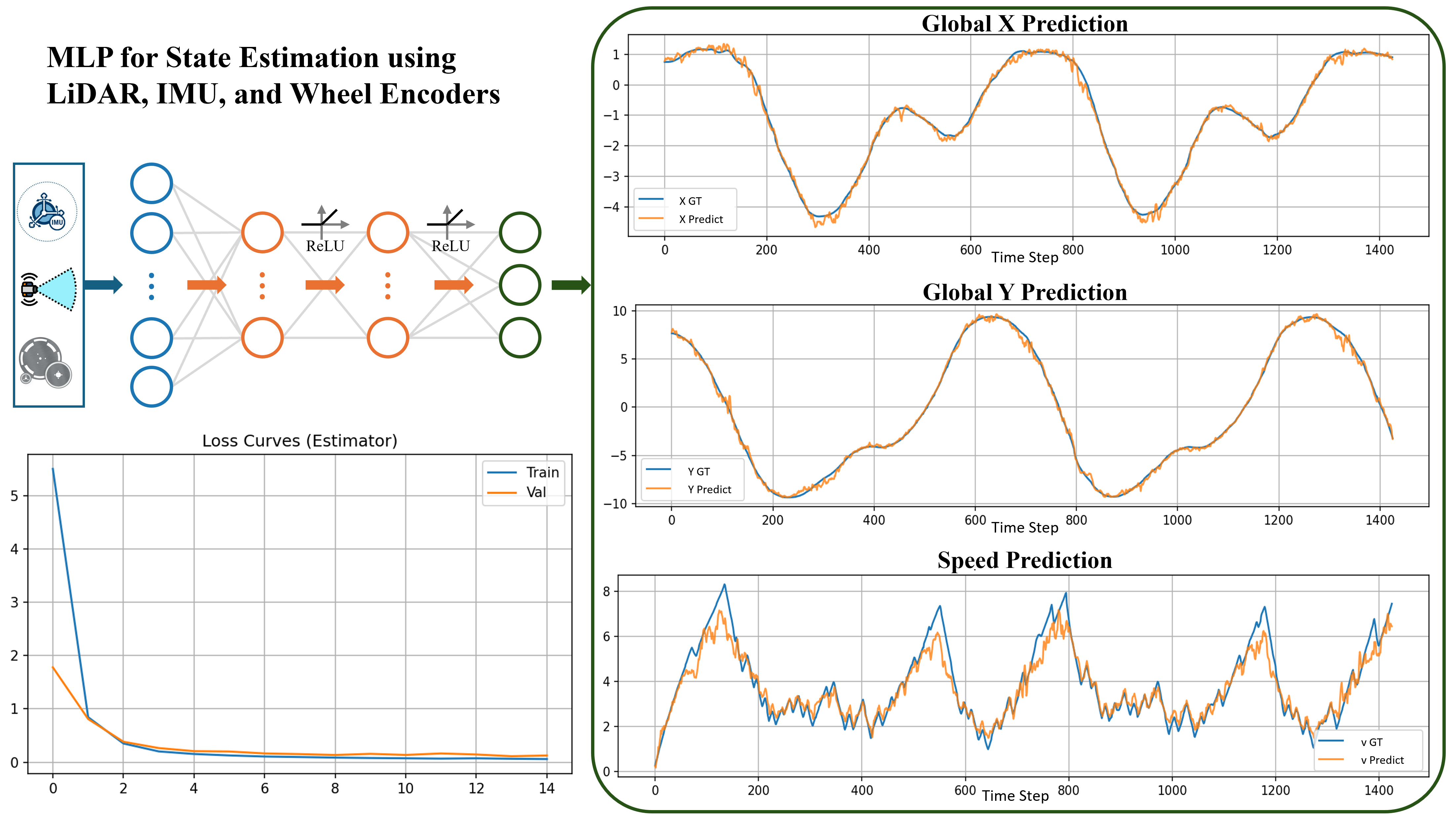
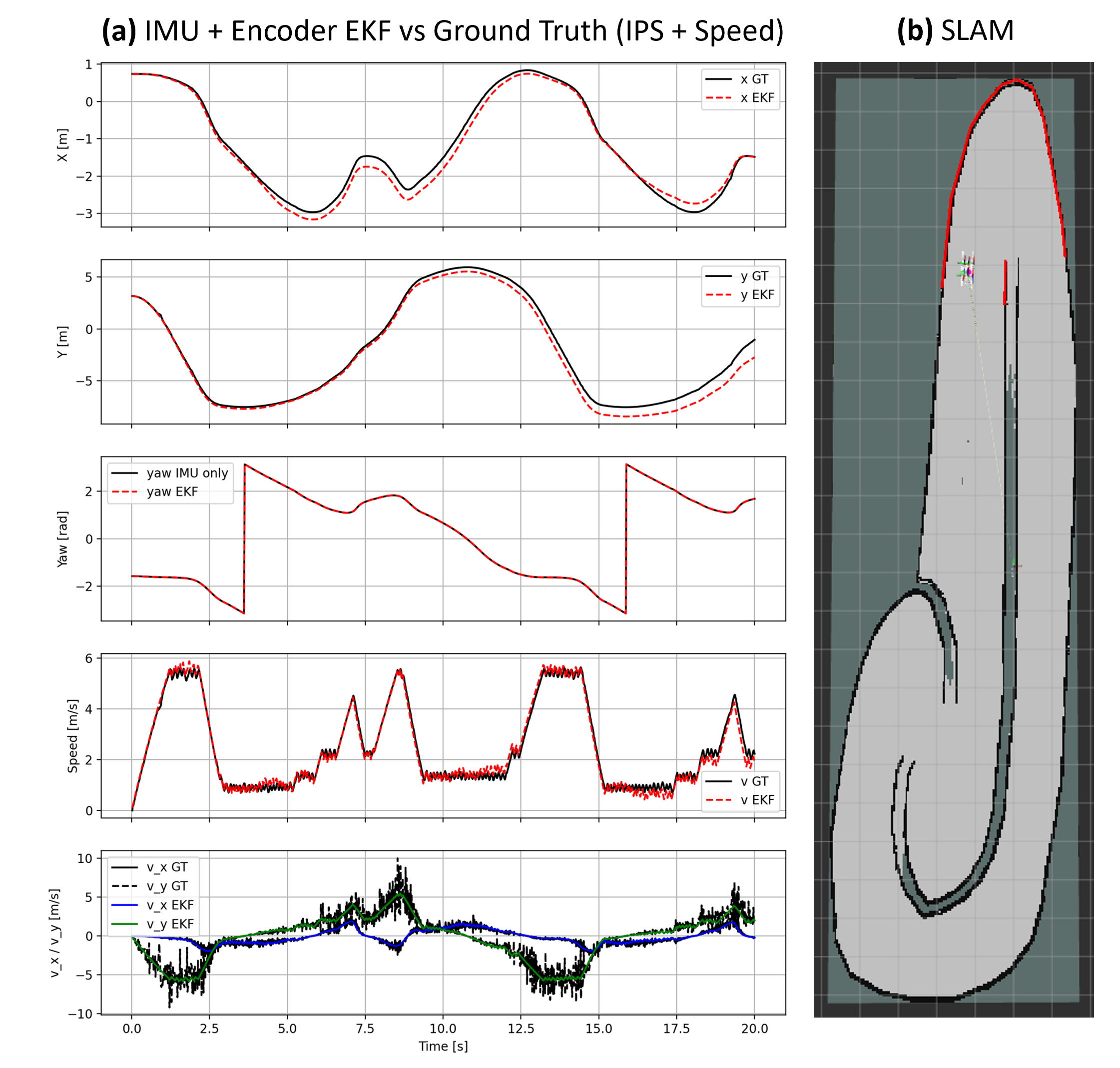
- Sensor fusion & state estimation: Explored multi-sensor localization by fusing LiDAR, IMU, and wheel encoders to estimate global position, yaw, and velocity.
- Estimation methods explored: Implemented and evaluated EKF, SLAM-based mapping/localization, and a learning-based (MLP) estimator.
- Key insight: Achieved low estimation RMSE, yet observed large closed-loop tracking error, highlighting practical integration challenges between estimation quality and control performance (latency, tuning, and interfaces).
Artifacts: Docker Image
Skills: LiDAR, Reactive Control, Path Planning, PID Control, EKF, Sensor Fusion, SLAM, Deep Learning, Docker
Note: Team qualified in the qualification round of AutoDRIVE RoboRacer Sim Racing (CDC-TF 2025).
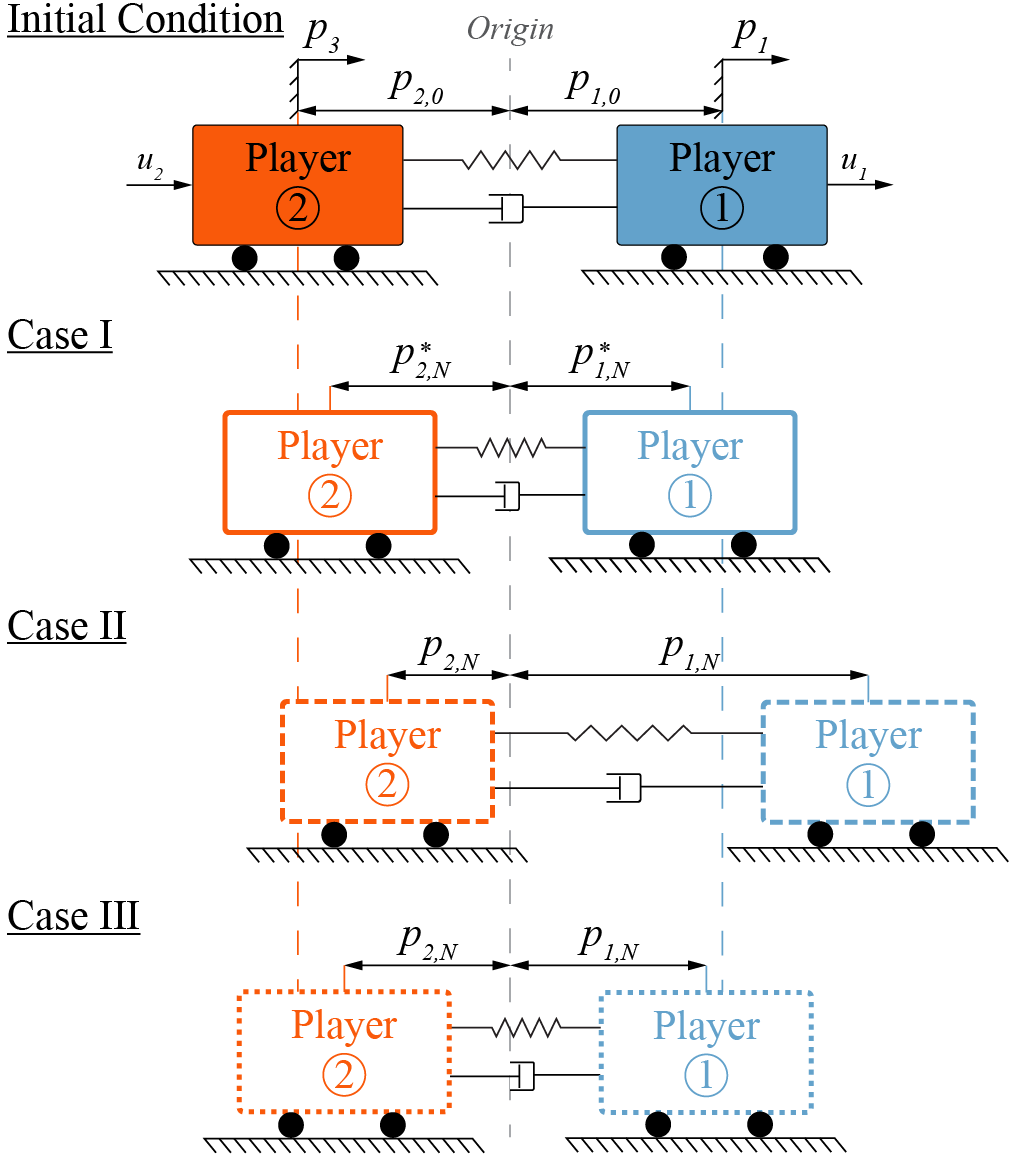
Optimal Modified Feedback Strategies in LQ Games under Control Imperfections
Role: Researcher
Institution: CORE Lab, UC Davis
Year: Fall 2025
Looked at a practical issue in two-player “game-theoretic” control: even if both players compute a Nash strategy, real hardware rarely executes commands perfectly (actuator lag, delays, saturation). Those small execution errors can throw off the interaction and increase the other player’s cost.
- Modeled the opponent’s execution mismatch as a measurable disturbance entering the coupled dynamics.
- Designed a deviation-aware compensation strategy using LQR-style tools by augmenting the state and solving an augmented Riccati recursion.
Outcome: in a spring–damper two-cart example, the compensated controller reduced Player 1’s lag penalty (vs. no compensation) and kept the trajectories closer to the nominal Nash behavior.
Related: publication entry
Skills: Dynamic Games, Robust/Optimal Control, Interaction Modeling, Riccati Methods, Simulation
Multi-Step Deep Koopman for Vehicle Control in Frenet Frame
Role: Researcher
Institution: CORE Lab, UC Davis
Year: Spring 2025
- Implemented cross-language integration by embedding Python in MATLAB/Simulink for a trajectory tracking MPC for high fidelity CarSim-modeled C-Class Hatchback vehicle.
- Presented at IROS 2025.
Skills: Python, MATLAB/Simulink, MPC Design, Koopman Operator, Deep learning-based system identification
Path-Planning and Collision Avoidance: Neural Network Approach
Role: Student
Institution: UC Davis
Year: 2024
- Reproduced key results from Neural A* and U-Net–based path planning studies, implementing and benchmarking architectures in PyTorch.
- Analyzed encoder–decoder variants (VGG-16, ResNet-50) and proposed modifications for dynamic and multi-agent navigation.
Skills: PyTorch, Deep Learning, Path Planning, Neural Networks
MIMO Optimal Robust Control for Fixed-Wing UAVs
Role: Student
Institution: UC Davis
Year: 2024
- Designed and compared PID, Youla, and H∞ robust controllers for fixed-wing UAV dynamics using MATLAB/Simulink.
- Analyzed performance and robustness under model uncertainty using frequency-domain tools.
Skills: MATLAB/Simulink, Robust Control, MIMO Systems, UAV Dynamics
Path-Planning and Collision Avoidance of Ground Vehicles
Role: Researcher
Institution: CORE Lab, UC Davis
Duration: Summer 2023 – Summer 2024
- Created a vehicle dynamic model in Julia.
- Augmented collision avoidance in optimal control problems using linear and nonlinear MPC.
Skills: Julia, Object-oriented programming, Vehicle dynamics, MPC
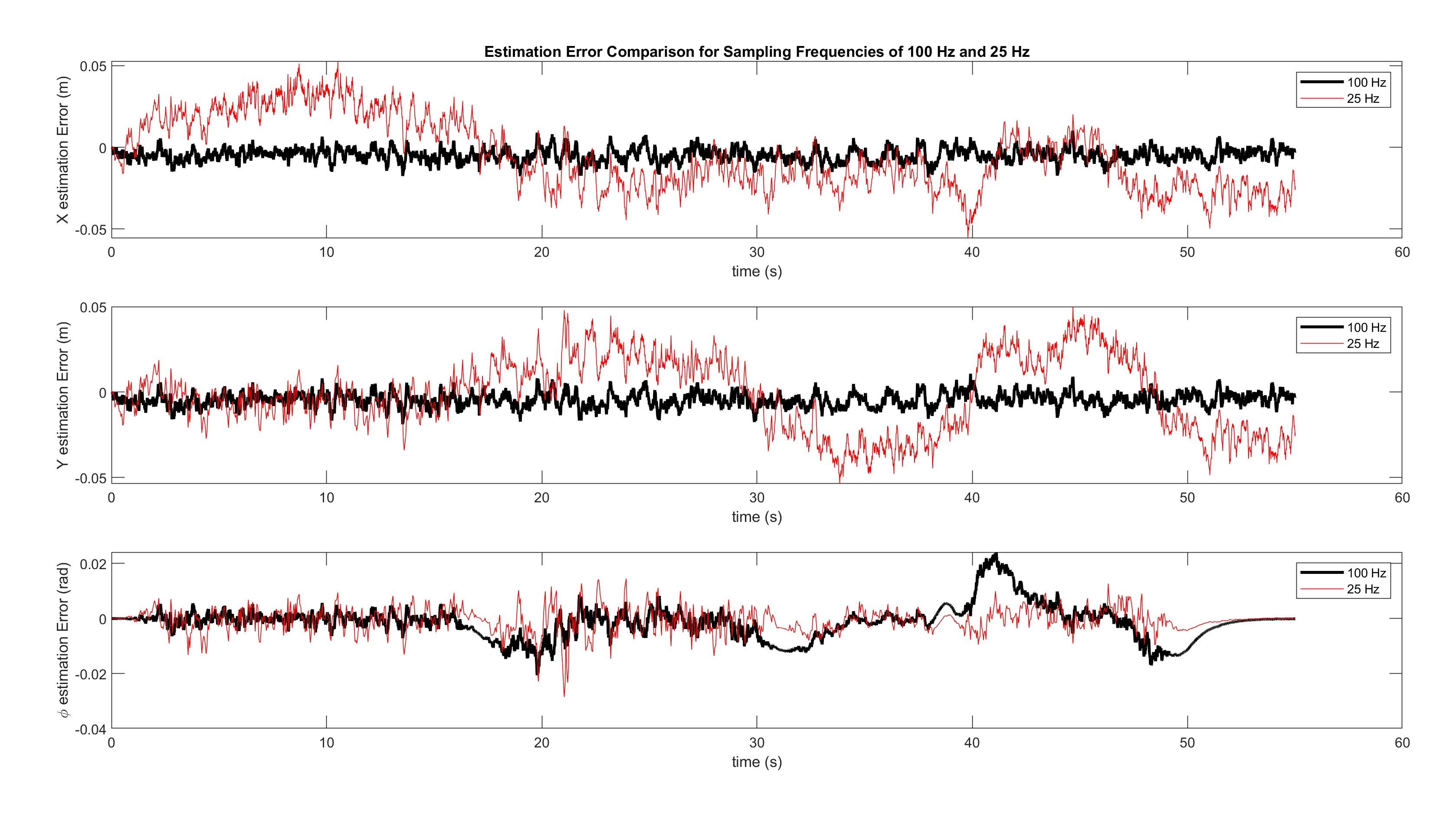
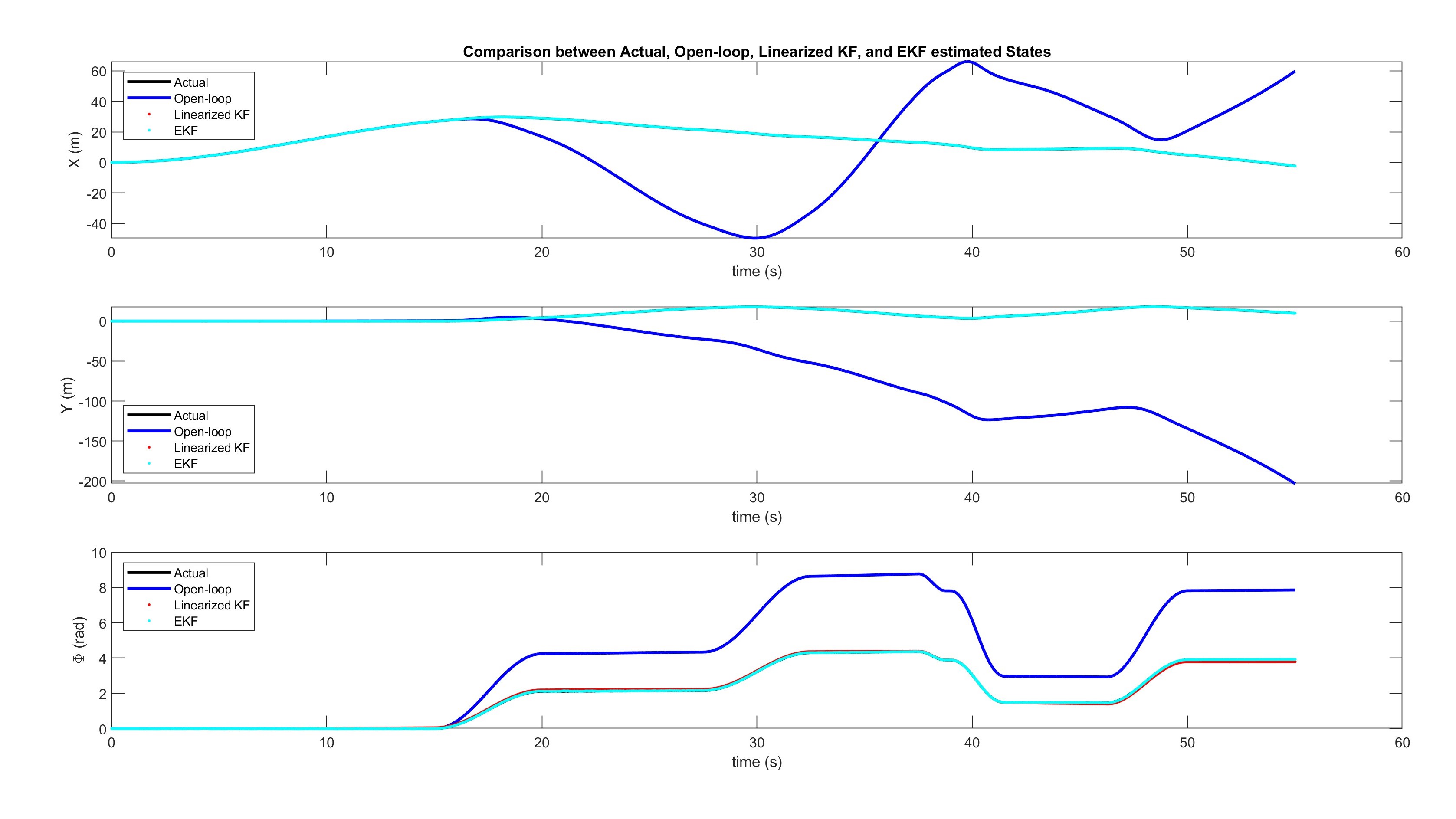
Position and Orientation Estimation of an RC Car Using Kalman Filtering
Role: Researcher
Institution: UC Davis
Duration: Spring 2023
- Modeled and simulated vehicle dynamics in MATLAB.
- Designed Kalman and Extended Kalman Filters.
Skills: MATLAB, Kalman Filter
Mechatronics & Systems Projects
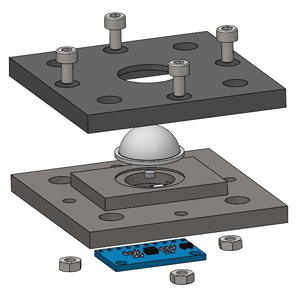
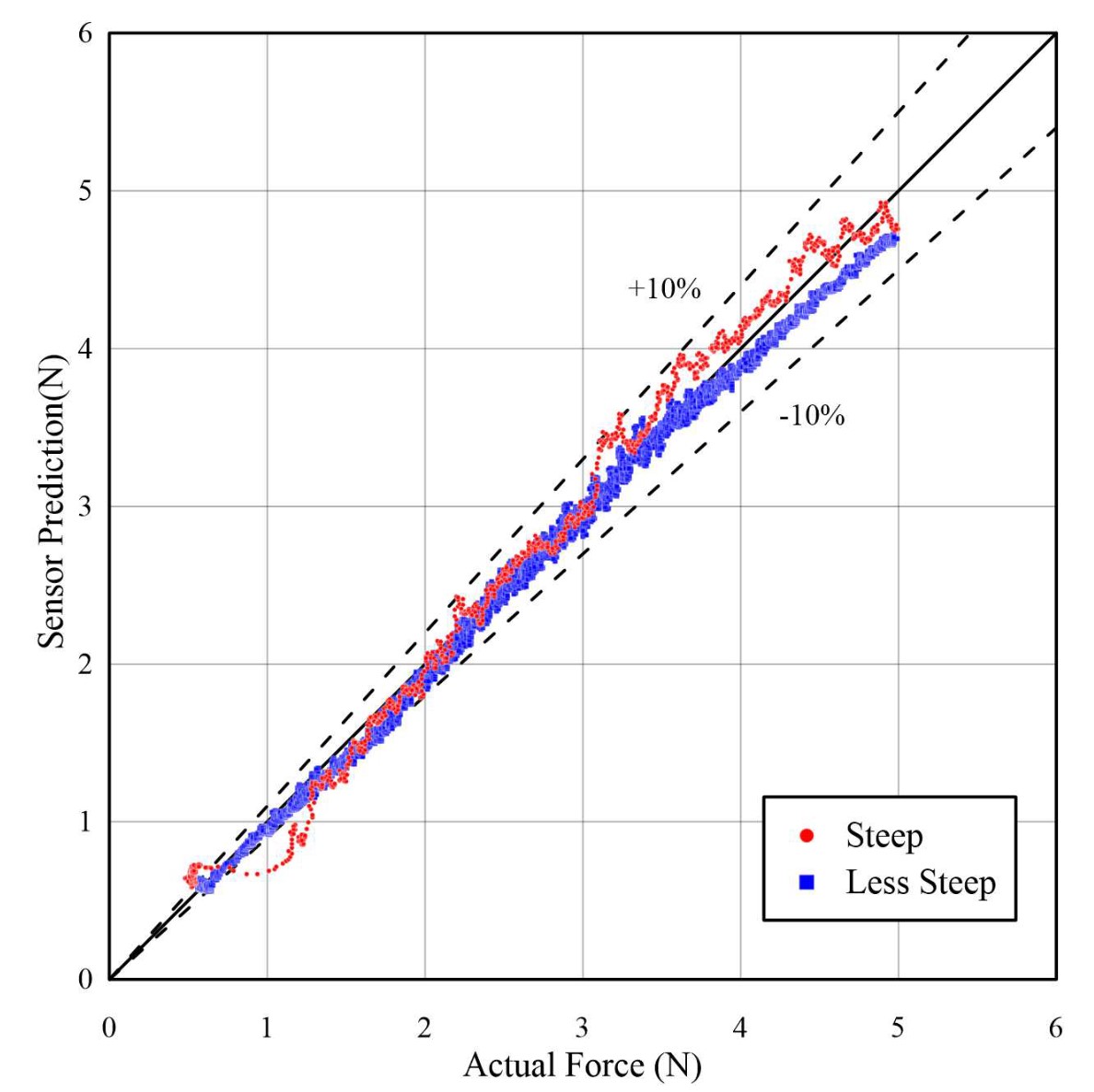
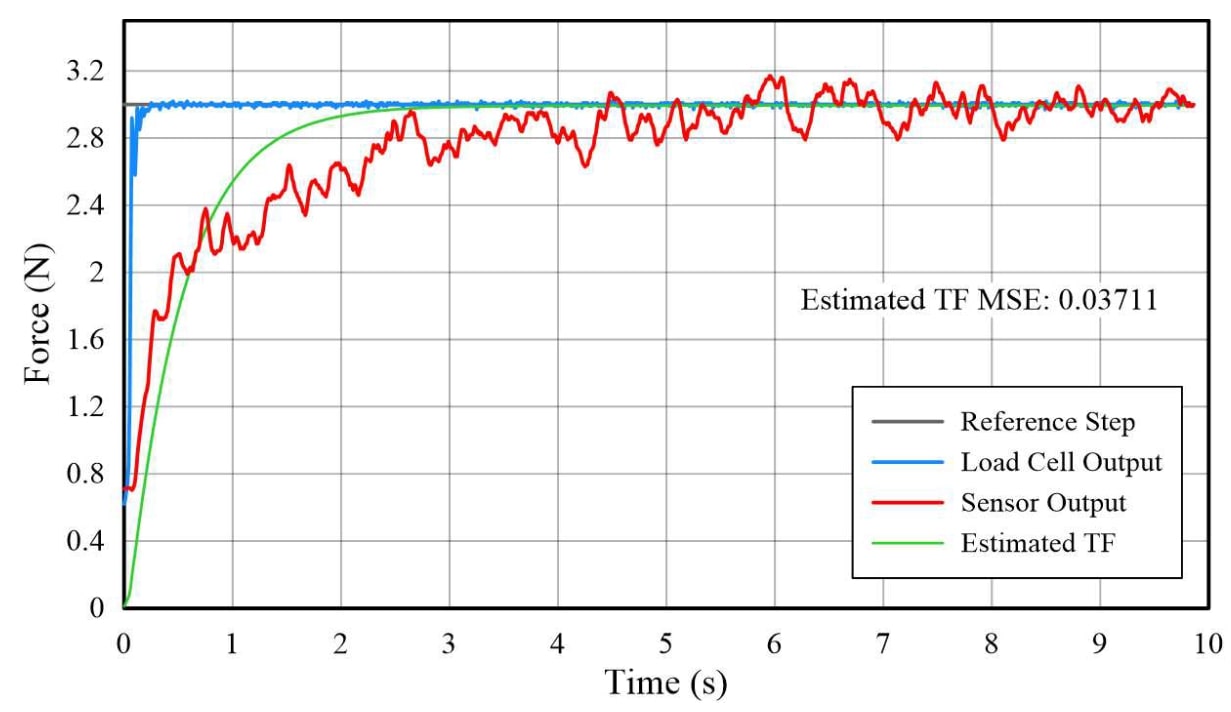
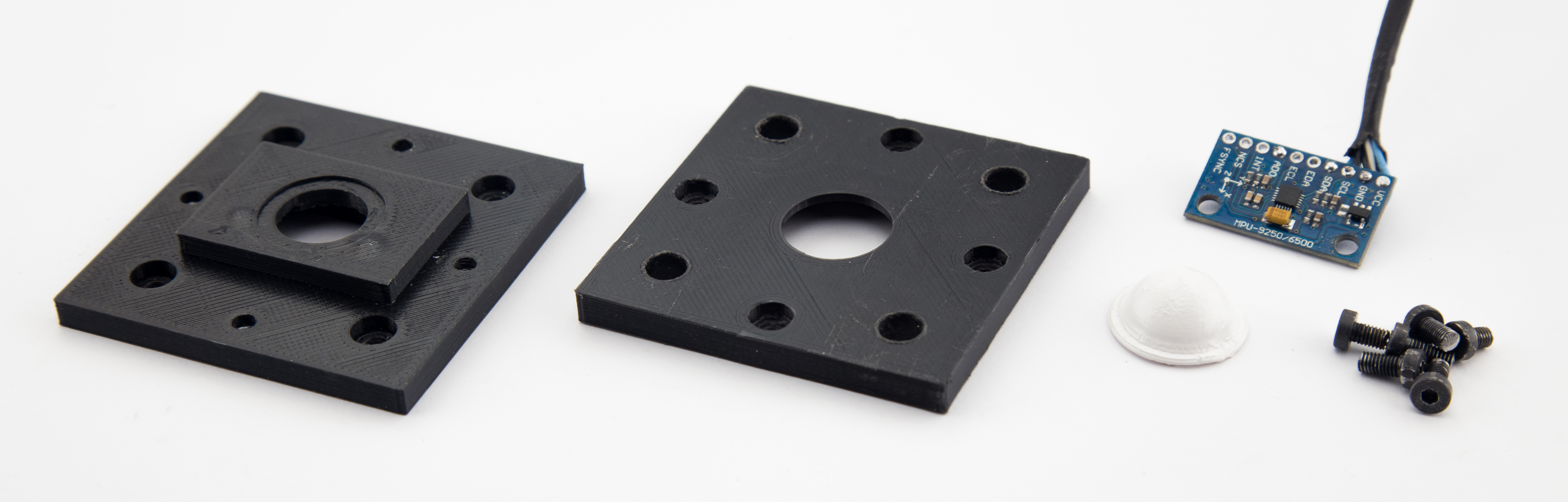
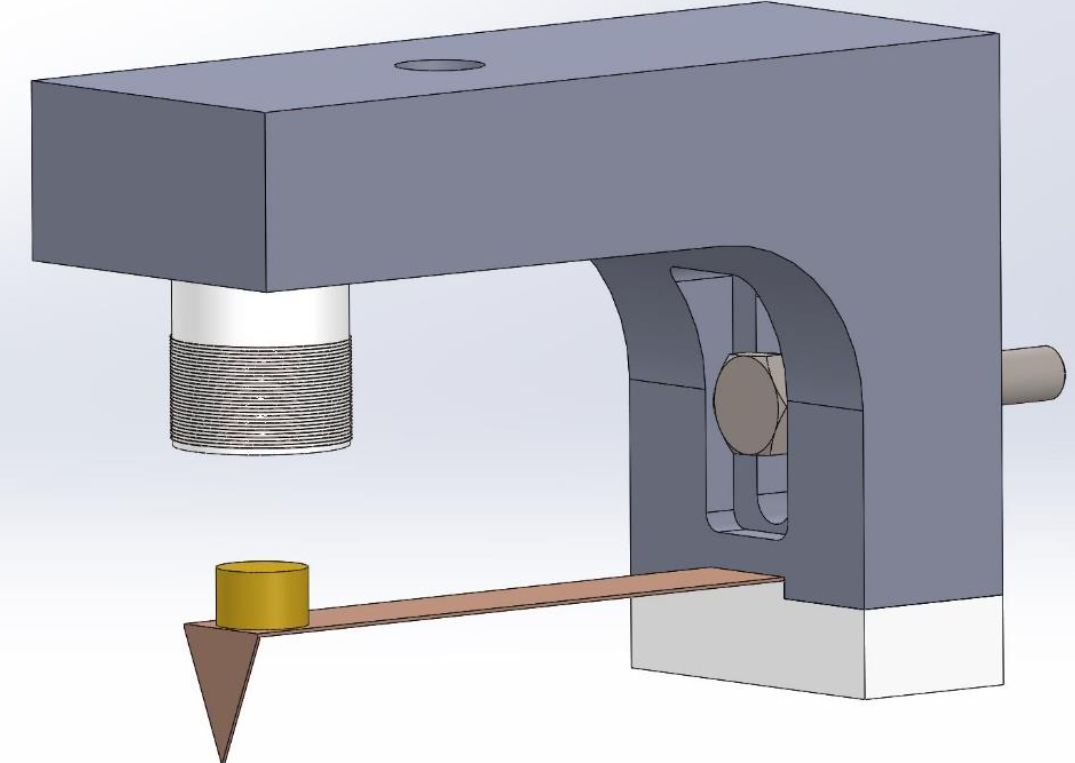
Design and Fabrication of a Soft Magnetic Tactile Sensor
Role: Researcher
Institution: Smart Electromechanical Energy Conversion Systems Lab (SEECS), University of Tehran
Duration: Feb. 2022 – Sep. 2022
- Performed mechanical analysis of dome deformation using resin, including stress-strain simulations.
- Utilized 3D-printing for prototyping and evaluated material properties through tensile testing.
- Designed and fabricated a Hall-effect-based tactile sensor for real-time force measurement.
- Developed and integrated data acquisition systems using Arduino for precise force measurements.
- Implemented a multi-layer perceptron to predict applied forces from Hall-effect signals.
Skills: C/C++, Electromechanical design, Embedded system, MLP, Mechanical analysis
Highlights: 4th best paper finalists at ICRoM 2022.

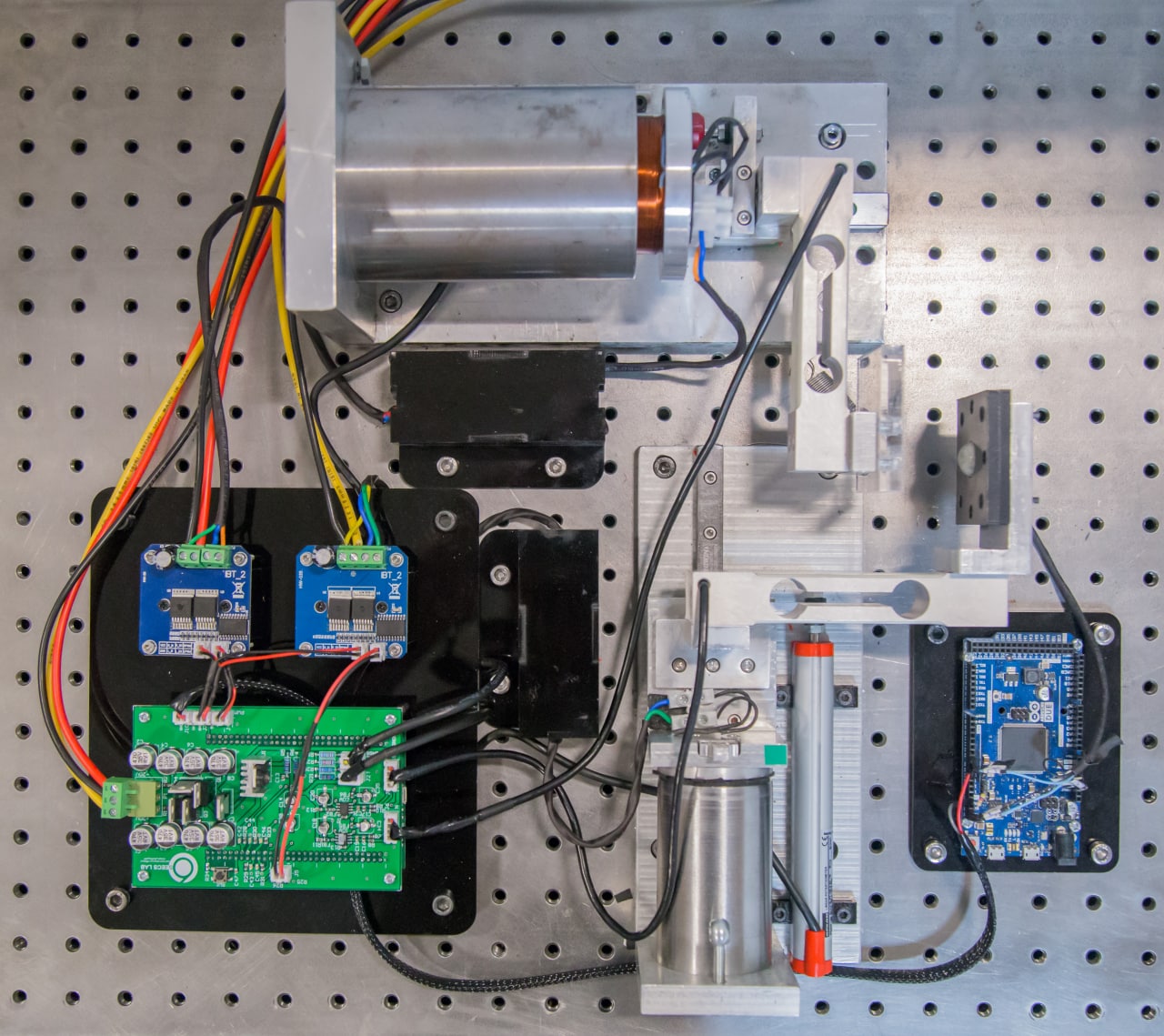
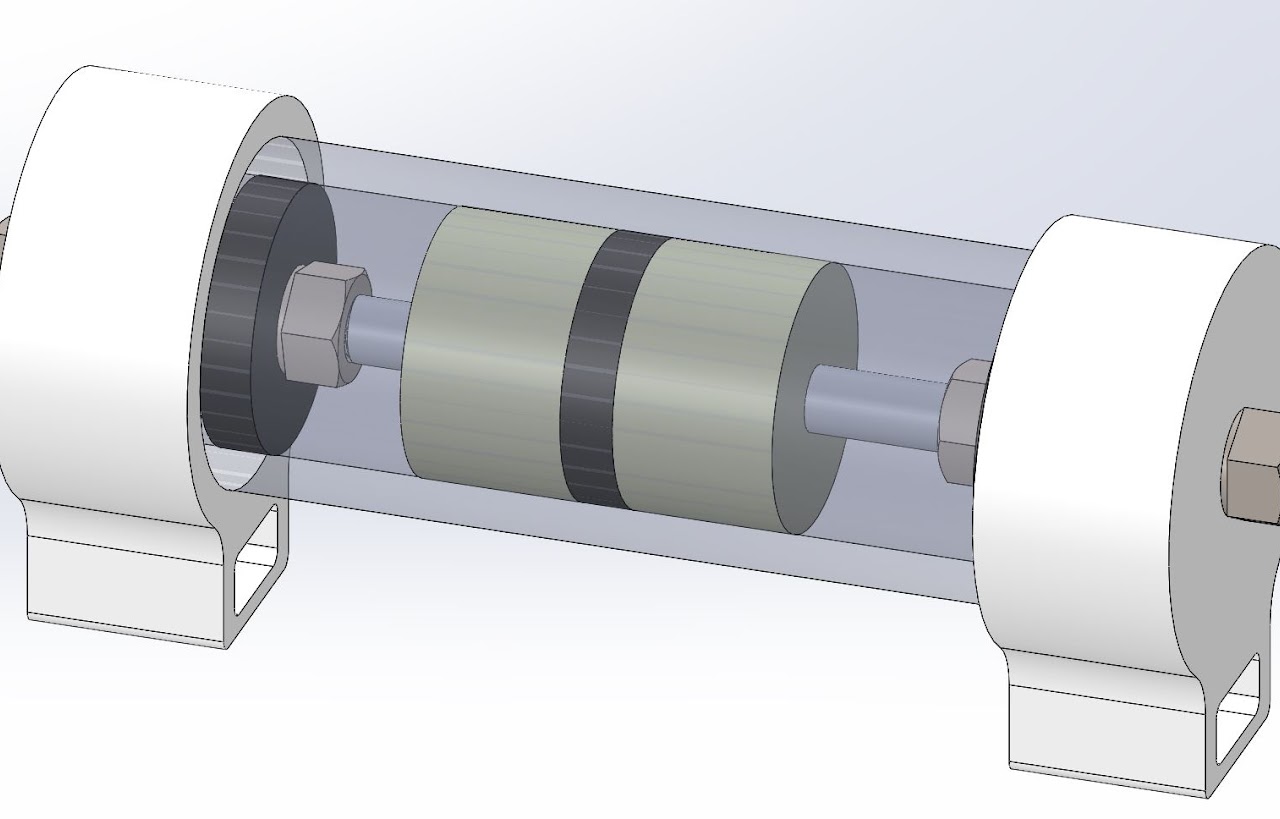
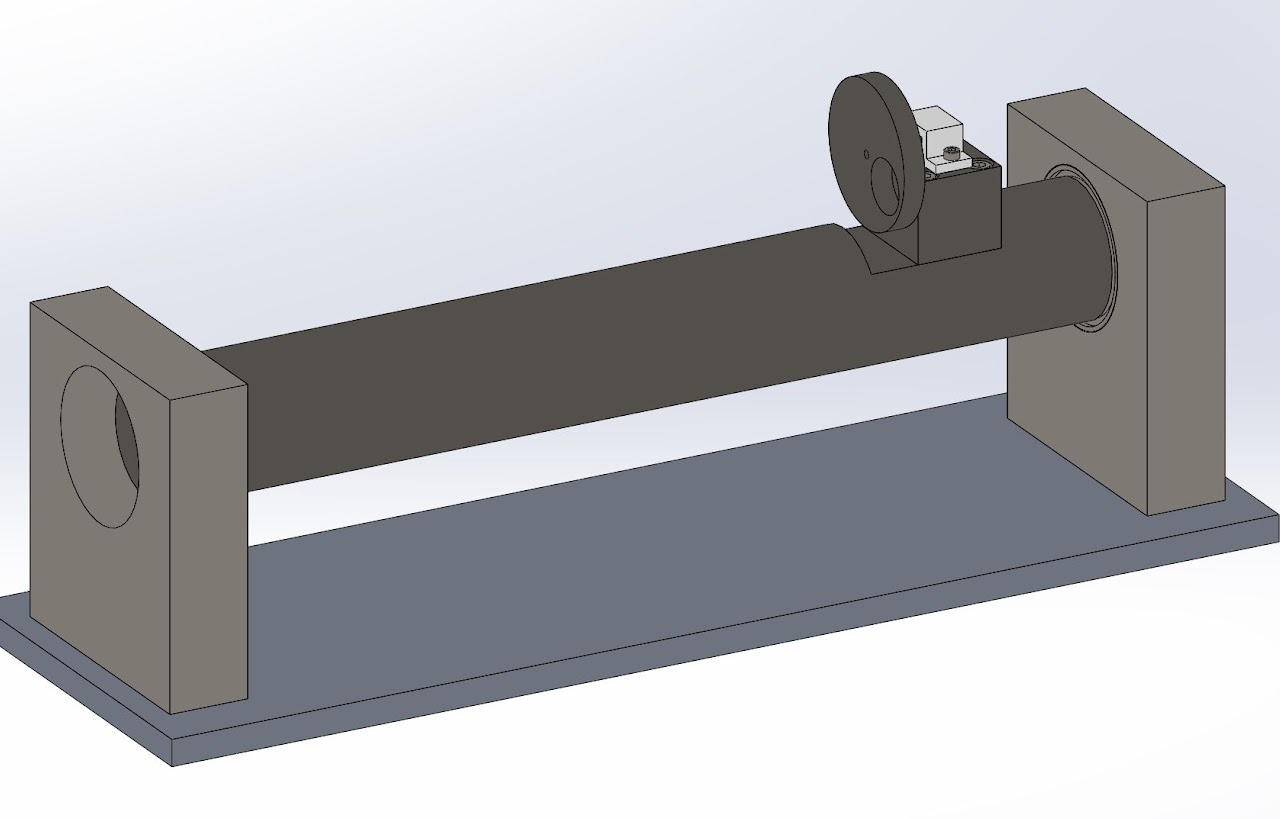
Test Rig Design for Tactile Sensor
Role: Researcher
Institution: Smart Electromechanical Energy Conversion Systems Lab (SEECS), University of Tehran
Duration: Feb. 2022 – Sep. 2022
- Designed and built a test bed and integrated two cylindrical linear voice coil actuators for normal/tangential forces.
- Designed and simulated the electrical circuit (instrumentation amps, bridges, filters) using Altium.
- Designed PID controllers for two voice coils using STM32.
Skills: C/C++, Altium, Electromechanical Design, Embedded System, Filtering
Hand Stabilizer Gloves for Parkinson Disease
Role: Researcher
Institution: Modal Analysis and Vibration Laboratory, University of Tehran
Duration: June 2020 – January 2021
- Design of a passive vibration absorber with a magnetic spring.
- Design of a vibrating shaft to simulate Parkinson tremors.
Skills: SOLIDWORKS, Design optimization
Highlights: Won research grant at ISAV 2020.
Macro-Atomic Force Microscopy
Role: Intern
Institution: Smart Electromechanical Energy Conversion Systems Lab (SEECS), University of Tehran
Duration: Summer 2021
- Modeling and analysis of the macro-AFM probe (mechanical + magnetic) using ANSYS.
- Study of frequency response and feedback.
Skills: SOLIDWORKS, Ansys, COMSOL, Frequency analysis
Mentorship & Technical Leadership
CORE Lab Vehicle Trajectory Prediction Team
Role: Mentor
Institution: CORE Lab, UC Davis
Duration: April 2025 – Present
- Mentored an undergraduate team developing ML models for interactive vehicle behavior prediction in multi-agent environments.
- Guided data processing, training pipelines, and model validation.
Skills: Machine Learning, Python, Data Modeling, Mentorship
F1Tenth Autonomous Racing Platform
Role: Supervisor
Institution: CORE Lab, UC Davis
Duration: 2023 – 2025
- Co-supervised and co-developed the lab’s F1tenth platform, establishing repeatable calibration/validation procedures.
- Guided an undergraduate team through hardware bring-up, instrumentation, and testing.
Skills: Embedded Systems, Instrumentation, Leadership, Autonomous Racing